|
<MISYS 연구실 인턴 모집>
- 소개: MISYS (Mobility Intelligence and Computing Systems) 연구실은 모빌리티를 위한 시스템 소프트웨어와 인공 지능 기술을 연구하는 연구실입니다.
- 지도교수: 김강희 교수
- 연구실 현황:
* 인원: 석사생 2명, 인턴 3명 (김강희 지도 학생들)
* 실적: 2022 산업부 자율주행 경진대회 준우승
- 바라는 인재상:
* 시스템 소프트웨어와 AI 소프트웨어를 아우르는 진정한 코딩 실력을 키우고자 하는 학생
* 지도교수 및 팀원들과 열린 마음으로 공감하고 소통하는 학생
- 신청방법:
* 11/15일(금)까지 김강희 교수에게 이메일 신청(khkim@ssu.ac.kr).
* 11월 중에 면접 실시 후 인턴 합격 여부를 알려드립니다.
* 이메일에 휴대폰 연락처를 반드시 기재하기 바랍니다.
|
인턴 기간
|
2025년 1월 ~ 2025년 6월 (6월초에 인턴 연장 협의)
|
|
모집 인원
|
5명 이상
|
|
자격 요건
|
(2025년 3월 기준) 3학년생 또는 4학년생
|
|
근무 조건
|
방학 중 주 40 시간 근무, 학기 중 주 20 시간 근무
학부 AID (AI자율주행) 소모임에 필요시 참여함
|
|
공통 혜택
|
매월 소정의 인건비 지원
|
|
선별 혜택
|
우수 인턴은 국제 학술 대회(2025년 6월)에 아래 프로젝트 결과물을 전시하고 발표할 수 있음
|
|
선택할
프로젝트
|
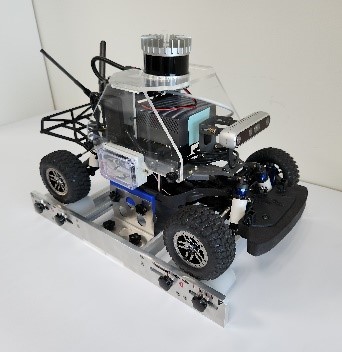
Project 1 (시스템SW+응용SW) F1Tenth Premium 모형차에 Autoware 이식
- F1Tenth Premium은 3차원 라이더(100 미터 탐지), 고정밀 GPS(오차 2.5 cm), 차량용 카메라(탐지 30미터), AGX Orin 보드를 장착한 10분의 1 크기의 모형차이며, 최대 속도 70 km/h 임 (아래 그림 참조)
- Autoware는 60 만줄 이상의 자율주행 오픈소스로서 측위 파이프라인, 탐지 파이프라인, 경로계획 파이프라인, 제어 파이프라인 등으로 구성되며, 150개 이상의 ROS 노드들을 동시 실행함
(URL: https://github.com/autowarefoundation/autoware.universe)
- 주요 업무: Autoware를 AGX Orin 보드에서 구동할 수 있도록, 센서 드라이버 bring-up, Autoware 경량화 및 최적화
- 기대 효과: C++ 코딩 역량, 대규모 SW 디버깅 역량, 모형차로 30 km/h 속도로 캠퍼스 자율 주행 데모
Project 2 (시스템SW) F1Tenth Premium 모형차에 PEELAS 프레임워크 이식 및 GPU로의 확장
- PEELAS는 Probabilistic End-to-end Latency Analysis and Synthesis의 약자로 자율주행 응용 또는 로봇 응용의 센싱부터 제어까지의 종단간 지연 시간을 최소화하는 CPU 스케줄을 자동 생성하는 프레임워크입니다. Misys 연구실에서 자체 개발한 CPU 스케줄 최적화 프레임워크입니다.
- 주요 업무: 이 프레임워크를 F1Tenth Premium에서 구동되는 ROS(로봇운영체제)와 Autoware에 이식하고, GPU 스케줄 최적화까지 확장함
- 기대 효과: C/C++ 코딩 역량, 대규모 SW 디버깅 역량, 운영체제 활용 역량, 모형차로 캠퍼스 안에서 고속 자율 주행 데모
Project 3 (시스템SW) F1Tenth Premium 모형차에 SOAFEE 플랫폼 이식
- SOAFEE는 ARM, AWS, Autoware 재단 등이 연합하여 자동차 SW(운영체제, HW 드라이버, 차량 응용 등)를 OTA(Over-The-Air)로 다운로드하는 것을 가능하게 하는 차량 플랫폼임 (URL: https://www.soafee.io/)
- 주요 업무: 운영체제, HW 드라이버, 컨테이너 기반 가상화 기술 등 시스템 SW 및 SOAFEE를 분석하고 관련 드라이버 및 플러그인을 개발함
- 기대 효과: C/C++ 코딩 역량, 대규모 SW 디버깅 역량, 운영체제 활용 역량, 모형차를 대상으로 SW 원격 업데이트 데모
Project 4 (AI+응용SW) F1Tenth Premium 모형차를 위한 Visual Odometry 기술 개발
- 카메라 (+ IMU or Odometry) 기반의 자율 주행을 위해 영상 이미지만으로 차량의 위치를 측정하고 궤적을 추정하는 기술
- 주요 업무: 이미지 분석, 차량 운동/위치/궤적 추정 알고리즘 구현, 모형차로 검증
- 기대 효과: C/C++ 코딩 역량, OpenCV 코딩 역량, 수학 코딩 역량, 모형차로 15 km/h 속도로 캠퍼스 자율 주행 데모
|
|